Summary
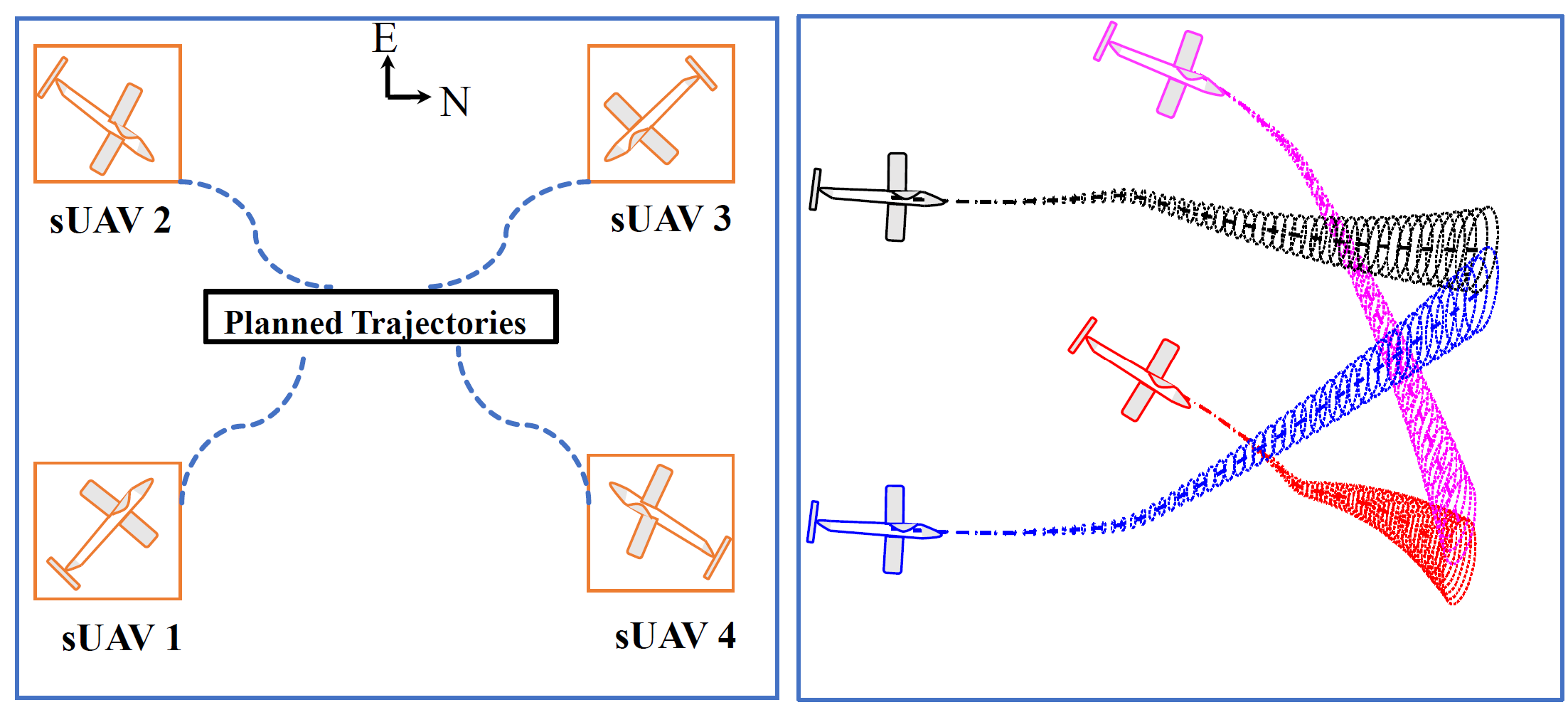
This project involves developing a computational toolbox to quantify the risk and hazards associated with a traffic of small unmanned aerial vehicles (sUAVs) in the National Airspace. Specifically, this toolbox allows us to assess the risk due to loss of control (that leads to increased risk of non-participant casualty) and degraded positioning system such as GPS (that leads to degraded separation assurance between vehicles). The hazards and risks in the unmanned traffic management (UTM) of sUAVS are quantified by considering the underlying uncertainties in their models, sensor noises and external factors (such as severe weather conditions. The toolbox utilizes mixed sparse grid (MSG)-based pseudospectral collocation technique in the generalized polynomial chaos (gPC) expansion framework to conduct uncertainty quantification (UQ) and sensitivity analysis. The toolbox predicts the mean trajectories and confidence ellipses for the traffic of sUAVS.
